ultra96v2のembedded platformをvitis 2020.2で作成した話。 VitisのVecaddを動かすまで。 前回の続き。
準備
vitisで使用するlinux_bifとqemu_args.txtとpmu_args.txtを準備する。
cd <work-dir-path>
mkdir vitis_argsvitis_argsにlinux.bifとqemu_args.txtとpmu_args.txtを保存する。内容は以下の通り。
- linux.bif
/* linux */
the_ROM_image:
{
[fsbl_config] a53_x64
[bootloader] <fsbl-ultra96v2-zynqmp.elf>
[destination_device=pl] <bitstream>
[pmufw_image] <pmu-firmware-ultra96v2-zynqmp.elf>
[destination_cpu=a53-0, exception_level=el-3, trustzone] <arm-trusted-firmware.elf>
[load=0x100000] <system.dtb>
[destination_cpu=a53-0, exception_level=el-2] <u-boot.elf>
}- qemu_args.txt
system.dtbは2020.1からBOOT.binで書き込むようにしている模様。
##work-dir-path##は環境に合わせて置き換えてください。
-M arm-generic-fdt
-net nic -net nic -net nic
-serial /dev/null -serial mon:stdio
-display none
-device loader,file=##work-dir-path##/petalinux/build/tmp/deploy/images/ultra96v2-zynqmp/arm-trusted-firmware.elf,cpu-num=0
-device loader,file=<u-boot.elf>
-device loader,file=##work-dir-path##/petalinux/build/tmp/deploy/images/ultra96v2-zynqmp/system.dtb,addr=0x100000
-drive file=##work-dir-path##/petalinux/build/tmp/deploy/images/ultra96v2-zynqmp/petalinux-image-minimal-ultra96v2ros2-ultra96v2-zynqmp.wic.qemu-sd,if=sd,id=sd0,format=raw,index=0
-boot mode=3
-global xlnx,zynqmp-boot.cpu-num=0
-global xlnx,zynqmp-boot.use-pmufw=true
-m 4G- pmu_args.txt
##work-dir-path##は環境に合わせて置き換えてください。
-M microblaze-fdt
-serial /dev/null -serial /dev/null
-display none
-device loader,file=##work-dir-path##/build/tmp/deploy/images/ultra96v2-zynqmp/pmu-ultra96v2-zynqmp.elf
-device loader,addr=0xfd1a0074,data=0x1011003,data-len=4
-device loader,addr=0xfd1a007C,data=0x1010f03,data-len=4Platformの作成
ここを参考にplatformを作成していく。 日本語ならこちら。
export LIBRARY_PATH=/usr/lib/x86_64-linux-gnu
source <path-to-vitis-installation>/2020.2/settings64.sh
cd <work-dir-path>
mkdir vitis_pfm
cd vitis_pfm
mkdir wksp1
vitis -workspace wksp1create platformを行い、platform名はultra96v2-platform、xsaは/xsa_dir/ultra96v2_4z/ultra96v2_4z.xsaを指定する。
linux domainの設定を以下のように行う。
Bif File: <work-dir-path>/vitis_args/linux.bif
Boot Components Directory:<work-dir-path>/boot
Linux Image Directory:<work-dir-path>/boot
Linux Rootfs:<work-dir-path>/petalinux/build/tmp/deploy/images/ultra96v2-zynqmp/petalinux-image-minimal-ultra96v2ros2-ultra96v2-zynqmp.ext4
Bootmode:SD
Sysroot Directory:<work-dir-path>/sdk/sysroots/aarch64-xilinx-linux
QEMU Data:<work-dir-path>/petalinux/build/tmp/deploy/images/ultra96v2-zynqmp
QEMU Arguments:<work-dir-path>/vitis_args/qemu_args.txt
PMU QEMU Arguments:<work-dir-path>vitis_args/pmu_args.txtplatformをbuildする。Application projectを作成するところまでは同じだが、その後のUIが少し変わっている。

vecadd_systemを開いてActive Build Configurationを変更してAssistant上でBuildする。
また、最初にリソースファイルを作成するようになったためか、buildボタンを押してしばらく反応が無かったりする。ビルドが始まるまで気長に待つ必要があった。 ビルドの際にkernelとhw_linkとhostプログラムを分けてビルドしてくれるようになったり、変更後のビルドで影響ある部分だけビルドしてくれたりと少し賢くなったけど、初動は遅くなったイメージを持った。
Platformのテスト
ここを参考にplatformのテストを行う。 日本語ならこちら。
application project nameはvecaddとした。 途中、Kernel Imageが空欄となっているので、/boot/Imageを指定しておく。
Emulation-SW
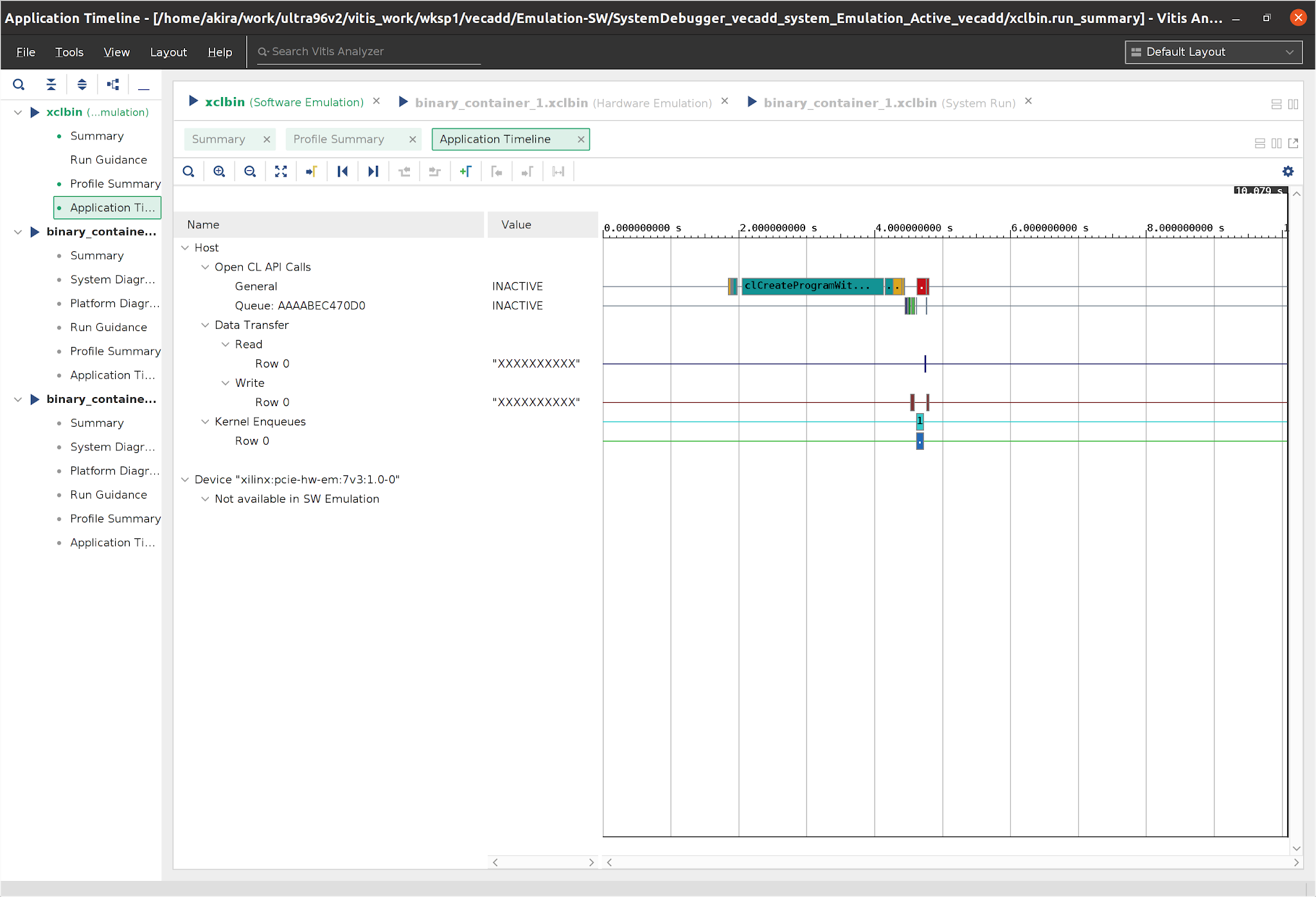
まずはvecadd_systemを開いてActive Build ConfigurationをEmulation-SWに変更してBuildする。 Launch on Emulatorを試す。 RunかDebugのボタンを押し、Launch SW Emulatorを選択する。 Application Timelineはデフォルトで有効になっていないので、有効にする場合はRun ConfigurationsからXilinx Runtime ProfilingのConfigurationをEditして、OpenCL detailed profile summary and timeline traceを選択する。


結果は以前と変化ないので省略。
また、2020.2ではEmulation-SWのLaunch on Hardwareに相当する操作はできなくなっていた。 アクセラレーション前の実行時間を計測するのに便利そうと思っていたのに。 直接動かしたり、コマンドラインからのデバッグ実行ならばいけるかもしれないので、後で試す。 (または、Emulatorが起動したとしてもTCFの接続先を実機にしておけば目的は達成されるかも)
Emulation-HW
vecadd_systemを開いてActive Build ConfigurationをEmulation-HWに変更してBuildする。 Launch Emulator in GUI modeを選択するとvivado simulatorが立ち上がるのが見える。

GUI modeの場合は手動で実行されるまでQEMUは実行を待機している模様。必要な信号線をaddした後にrun allすることを想定しているのかな。

今回Emulation-HWの動作が期待通りとなることを確認したけど、v2020.1でEmulation-HW(Launch on Hardware)は何をやっていたことになるのか謎。 Timelineあったけど、普通にHardwareの動作していただけ?
Hardware
vecadd_systemを開いてActive Build ConfigurationをHardwareに変更してBuildする。 SDの準備はv2020.1と同じ。sd_card.imgをddすれば良い。
また、これもv2020.1の時と同じであるが、Lunch Target Connectionで実機に接続できるように設定を行う。Emulation-SWのLaunch Target Connectionを参照。
実行結果はTEST PASSEDが出るだけで特別言うことも無いので省略。
Vitis Analyzer
それぞれの実行結果を記載する。
Emulation-HWの結果がエラい長いけどこんな感じでいいのか?
Emulation-SW

Emulation-HW


Hardware


0 件のコメント:
コメントを投稿